一.机器人 常用的控制方法
(1) 基于模型的控制
需要确定机器人的结构及机械参数,用动力学方程来描述其动态特性,理论依据多来自自动控制理论,常有前馈补偿控制,计算力矩法,最优控制法,非线性反馈控制法。
缺点是:在实际工程中,机器人是非线性和不确定性系统,难以得到精确的数学模型,所以难以实际应用这些方法。
(2)PID控制
随处可见的控制方法,优点就是控制律简单,易于实现,不用建模;
缺点是:1,难以保证机器人具有良好的动态和静态品质,二是需要较大的控制量;
(3) 自适应控制
严肃一点说就是这种控制方法可以根据要求的性能指标与实际系统的性能指标相比较所获得的信息来修正控制规律或控制器参数,使系统能保持最优或次优的工作状态的控制方法。简单的说,就是控制器能及时修正自己的特性以适应控制对象和外部扰动的动态特性变化。
(4)鲁棒控制
鲁棒控制器仅需知道限制不确定性的最大可能性的边界即可,鲁棒控制可同时补偿结构和非结构的不确定性影响。而且鲁棒控制相比自适应控制实现简单,没有自适应律,对时变参数及非结构非线性不确定性的影响有更好的补偿效果,更易于保证稳定性。
(5)神经网络和模糊控制
具有高度的非线性逼近映射能力,神经网络和模糊系统可解决复杂的非线性,不确定性及不确知系统的控制,而且可实现对机器人动力学方程中未知部分精确逼近,从而可通过在线建模和前馈补偿,实现机器人的高精度跟踪。
(6)迭代学习控制
具有严格的数学描述,适合于解决非线性,强耦合,建模难,运动具有重复性的对象的高精度控制问题。不依赖于系统的精确数学模型,算法简单,机器人轨迹跟踪是其典型代表。
(7) 变结构控制
通过控制量的切换使变系统状态沿滑模面滑动,本质上是一类特殊的非线性控制,非线性表现为不连续性。滑动模态可以进行设计且与对象参数及扰动无关,所以变结构控制具有快速响应,对参数变化及扰动不领命。
(8)反演控制设计法
基本思想是将复杂的非线性系统分解成不超过系统阶数的子系统,为每个系统分别设计李雅普诺夫函数和中间虚拟控制量,一直“后退”到整个系统,直到空置律设计完成。
---------------------
作者:shuaigongzi
来源:CSDN
二.控制KUKA机器人的演示案例!手把手教你搞明白这些运动指令知识
(1)按轴坐标的运动(PTP:Point-toPoint,即点到点)
(2)沿轨迹的运动:LIN直线运动和CIRC圆周运动
(3)样条运动:SPLINE运动
点到点运动
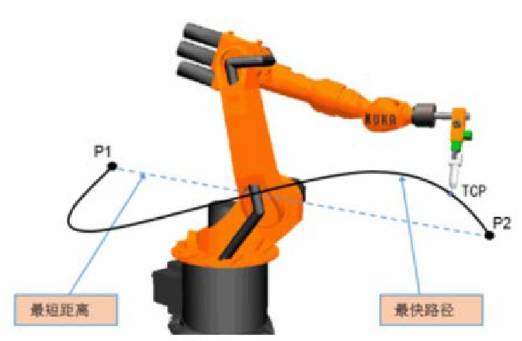
PTP运动是机器人沿最快的轨道将TCP从起始点引至目标点,这个移动路线不一定是直线,因为机器人轴进行回转运动,所以曲线轨道比直线轨道运动更快。此轨迹无法精确预知,所以在调试及试运行时,应该在阻挡物体附近降低速度来测试机器人的移动特性。
线性运动
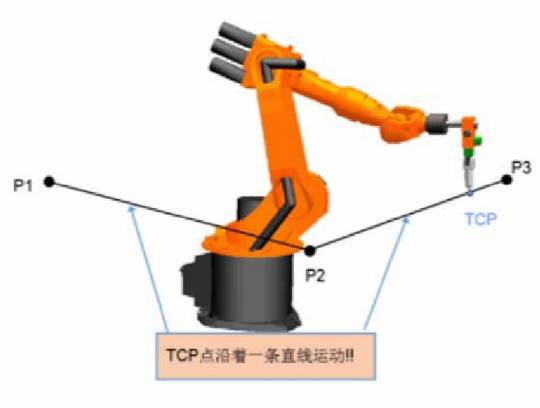
线性运动是机器人沿一条直线以定义的速度将TCP引至目标点。在线性移动过程中,机器人转轴之间进行配合,是工具或工件参照点沿着一条通往目标点的直线移动,在这个过程中,工具本身的取向按照程序设定的取向变化。
圆周运动

圆周运动是机器人沿圆形轨道以定义的速度将TCP移动至目标点。圆形轨道是通过起点、辅助点和目标点定义的,起始点是上一条运动指令以精确定位方式抵达的目标点,辅助点是圆周所经历的中间点。在机器人移动过程中,工具尖端取向的变化顺应与持续的移动轨迹。
样条运动
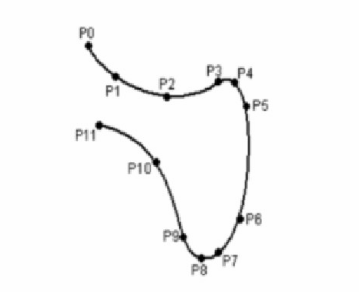
样条运动是一种尤其适用于复杂曲线轨迹的运动方式,这种轨迹原则上也可以通过LIN运动和CIRC运动生成,但是相比下样条运动更具有优势。
创建以优化节拍时间的运动(轴运动)
1
PTP运动
PTP运动方式是时间最快,也是最优化的移动方式。在KPL程序中,机器人的第一个指令必须是PTP或SPTP,因为机器人控制系统仅在PTP或SPTP运动时才会考虑编程设置的状态和转角方向值,以便定义一个唯一的起始位置。
2
轨迹逼近
为了加速运动过程,控制器可以CONT标示的运动指令进行轨迹逼近,轨迹逼近意味着将不精确到达点坐标,只是逼近点坐标,事先便离开精确保持轮廓的轨迹。
PTP运动的轨迹逼近是不可预见的,相比较点的精确暂停,轨迹逼近具有如下的优势:
(1)由于这些点之间不再需要制动和加速,所以运动系统受到的磨损减少。
(2)节拍时间得以优化,程序可以更快的运行。

创建PTP运动的操作步骤
(1)创建PTP运动的前提条件是机器人的运动方式已经设置为T1运行方式,并且已经选定机器人程序。
(2)操作机器人将TCP移向应被设为目标点的位置。
(3)然后将光标放置在其后应添加运动指令的那一行程序中。
(4)点击菜单序列指令>运动>PTP,作为选项,也可以在相应行中按下软件运动,选完运动指令后,出现PTP指令的联机表单。
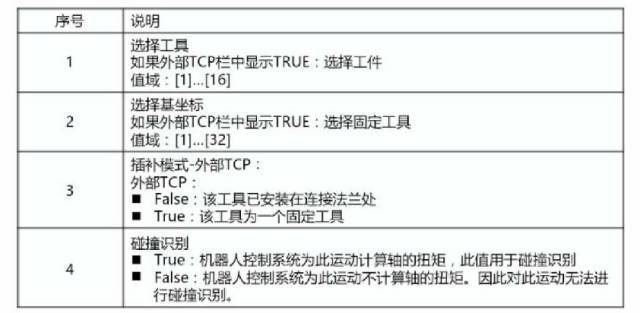
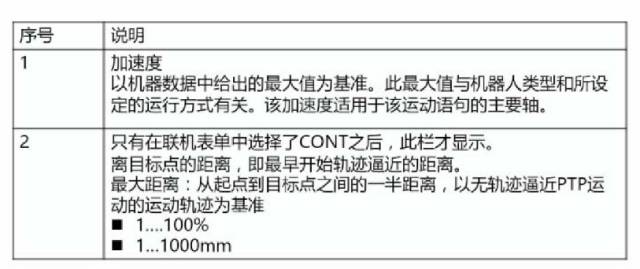
(5)在联机表单中输入参数,各个参数含义如下表所示。


(6)在选项窗口“坐标系”中输入工具和基坐标系的正确数据,以及关于插补模式的数据和碰撞监控的数据。
(7)在运动参数选项窗口中可将加速度从最大值降下来。如果已经激活轨迹逼近,则也更改轨迹逼近距离。根据配置的不同,该距离的单位可以设置为mm或%。
关注我们:请关注一下我们的微信:扫描二维码
 (鼠标移入红色字)
(鼠标移入红色字)版权声明:本文为原创文章,版权归 admin 所有,欢迎分享本文,转载请保留出处!
